I am a Computer Science undergraduate student and a FAPESP Research Fellow at the University of São Paulo (USP), under the supervision of Prof. Marcelo Becker. Currently, I am based in Champaign, Illinois, working as a Fully Funded Research Intern at the Distributed Autonomous Systems Lab (DASLab) at the University of Illinois Urbana-Champaign (UIUC) advised by Prof. Girish Chowdhary.
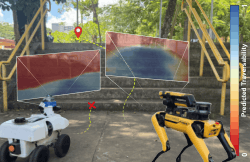
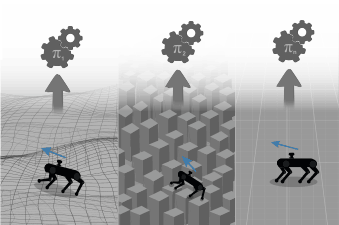
My research focuses on developing adaptive quadruped locomotion and mobile manipulation policies using Mixture-of-Experts (MoE) architectures and Reinforcement Learning. I am deeply passionate about embodied autonomy, investigating how robotic systems can dynamically adjust to unstructured terrains and physical constraints through scalable models, visual perception, and temporal memory. Key research areas include:
- Developing agile whole-body control strategies for quadrupedal loco-manipulation.
- Training robust deep reinforcement learning policies for sim-to-real robotic transfer.
- Leveraging Mixture-of-Experts frameworks for policy adaptation in unstructured environments.
- Integrating computer vision and temporal memory for real-time perceptive locomotion.